2024.7.9 수업날
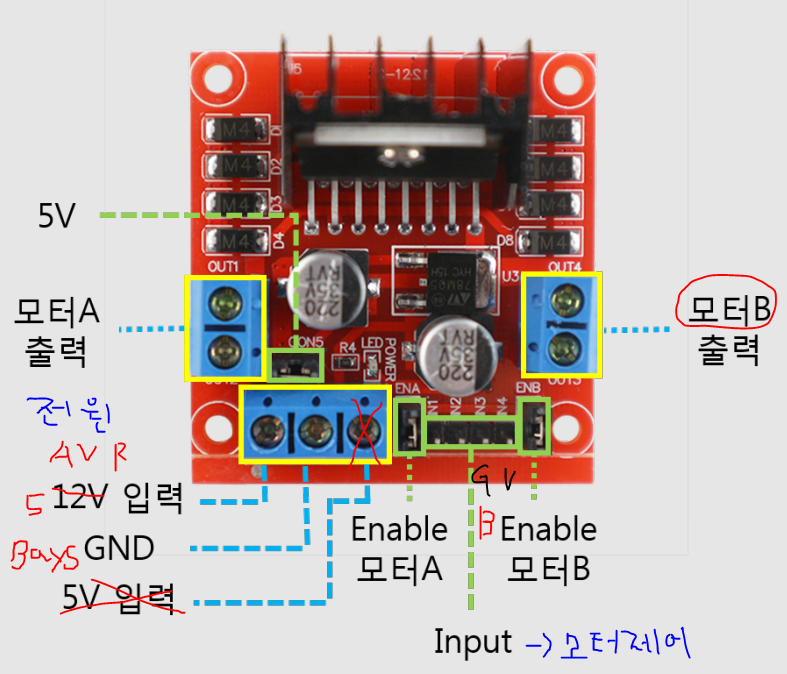
< ez motor 제어하기 >
pwm_128step_100 소스코드
//////////////////////////pwm 제어하기, 128분주기(100MHz로 나눈)
// 모터는 100Hz
module pwm_128step_100(
input clk, reset_p,
input [6:0]duty,
output reg pwm );
parameter sys_clk_freq = 100_000_000; //시스템 클록, 100MHz
parameter pwm_freq = 100; //pwm 출력, 100Hz
parameter duty_step = 128; // 듀티 싸이클 128로 설정
parameter temp = sys_clk_freq / pwm_freq / duty_step; // 타이머 카운트 주기, parameter 상수는 그냥 수이기 때문에 회로 만들때는 나누기 회로가 만들어지지 않음
parameter temp_half = temp / 2;
integer cnt; // 카운터 변수 선언
reg pwm_freqX128; // 128배 주파수를 가지는 PWM 신호를 저장하는 레지스터 선언
always @ (posedge clk or posedge reset_p) begin
if(reset_p) begin
pwm_freqX128 = 0;
cnt = 0;
end
else begin
if(cnt >= (temp - 1))cnt = 0; //78분주-->10,000/128
else cnt = cnt + 1;
//if(cnt < (pwmXduty_steps / 2)) pwm_freqX128 = 0; // 마찬가지로 상수이기 때문에 상관 없음
if(cnt < temp_half) pwm_freqX128 = 0;
else pwm_freqX128 = 1;
end
end
wire pwm_freqX128_nedge;
edge_detector_n ed(
.clk(clk), .reset_p(reset_p),
.cp(pwm_freqX128), .n_edge(pwm_freqX128_nedge));
reg [6:0] cnt_duty; // 2^7=128분주기
always @ (posedge clk or posedge reset_p)begin
if(reset_p) begin
cnt_duty = 0;
pwm = 0;
end
else if(pwm_freqX128_nedge)begin
cnt_duty = cnt_duty + 1; // 128에 한번 씩 0이됨
if(cnt_duty < duty)pwm = 1;
else pwm = 0;
end
end
endmodule
dc_motor_pwm_top 소스코드
//////////////////////////////////////////////// 2024.7.9
//////////////// 모터 pwm 제어
module dc_motor_pwm_top(
input clk, reset_p,
output motor_pwm,
output [3:0] com,
output [7:0] seg_7);
reg [31:0] clk_div;
always @(posedge clk) clk_div = clk_div + 1;
pwm_128step_100 pwm_motor(
.clk(clk), .reset_p(reset_p),
.duty(clk_div[31:25]),
.pwm(motor_pwm));
fnd_4digit_cntr FND_distance(.clk(clk), .value(motor_pwm), .com(com), .seg_7(seg_7));
endmodule
dc_motor_pwm_fnd_top 소스코드
//////////////// 모터 pwm 제어 fnd 출력
module dc_motor_pwm_fnd_top(
input clk, reset_p,
output motor_pwm,
output [3:0] com,
output [7:0] seg_7);
reg [32:0] clk_div;
always @(posedge clk) clk_div = clk_div + 1;
pwm_128step_100 pwm_motor(
.clk(clk), .reset_p(reset_p),
.duty(clk_div[32:26]),
.pwm(motor_pwm));
wire [15:0] duty_bcd;
bin_to_dec btd_duty(.bin({5'b0, clk_div[32:26]}), .bcd(duty_bcd));
fnd_4digit_cntr FND_duty(.clk(clk), .value(duty_bcd), .com(com), .seg_7(seg_7));
endmodule
PWM으로 모터 제어하기 끝!
'Harman 세미콘 아카데미 > Verilog' 카테고리의 다른 글
| 2024.7.11 [Verilog] 다기능 선풍기 만들기 팀 프로젝트 (0) | 2024.07.11 |
|---|---|
| 2024.7.10 [Verilog]17 - PWM으로 servo 모터 제어하기, ADC (0) | 2024.07.10 |
| 2024.7.8 [Verilog]15 - PWM으로 led 제어하기 (0) | 2024.07.08 |
| 2024.7.5 [Verilog]14 - 다기능 시계 만들기 개인프로젝트 (0) | 2024.07.05 |
| 2024.7.4 [Verilog]13 - 초음파센서 (0) | 2024.07.04 |